Una de las líneas de desarrollo que se está siguiendo en el uso de robots es la de cambiar un único robot por un sistema múltiple de robots más pequeños colaborando entre si, lo que presenta una serie de ventajas, pero también nuevos desafíos.
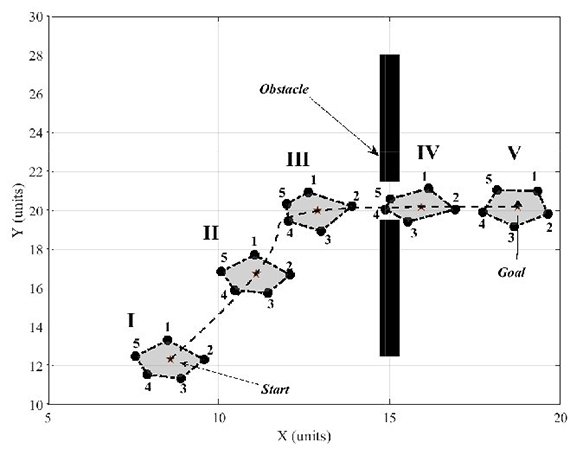
Unos investigadores del Institute of Technology Gandhinagar han presentado una técnica para planificar los caminos de estos sistemas múltiples. Esta técnica coloca un agente virtual en el centro de la formación, asegurando que mantienen la formación y permite la suficiente flexibilidad como para superar obstáculos presentes en su camino.
Esta nueva técnica desarrollada por el Provesor Vadali y su colega el Doctor Rohith G. permite equipos con formaciones más flexibles y usa un algoritmo de planificación de caminos que trata de identificar el camino de mínima energía que permite a cada robot individual alcanzar su meta, teniendo en cuenta no sólo los obstáculos, sino también al resto de robots de la formación, para evitar colisiones.
Fuente (en inglés): https://techxplore.com/news/2021-04-technique-paths-multiple-robots-flexible.html